 Помощь
Помощь











*
два моторчика (по 1.5 вольт каждый)
*
два SPDT выключателя
*
две батарейки
*
один корпус для этих батареек
*
один пластиковый шарик со сквозным отверстием
*
три скрепки
*
немного проводков

Купить это можно или на радиорынке, или в интернет-магазине. В любом случае вы уложитесь в 300-400 рублей.
Итак, вы приобрели все необходимые детали, и я начинаю объяснять, что и как нужно делать.
Шаг 1
У нас есть проводки. Нарезаем 13 проводков по 6 см каждый.

Теперь у каждого провода с двух концов удаляем по 1 см изоляцию плоскогубцами или ножом.
Шаг 2
С помощью паяльника прикрепляем по два провода к моторчикам и по три провода к SPDT выключателям.

Шаг 3
Берём корпус для батареек. С одной стороны от него отходят красный и чёрный провода. Поэтому к другой стороне припаиваем ещё один провод.

Теперь переворачиваем держатель батареек вверх ногами и с помощью клея приклеиваем SPDT выключатели в форме буквы V.
Шаг 4
Далее к корпусу для батареек приклеиваем два наших моторчика так, чтобы они вращались вперёд.
Шаг 5
Берём большую скрепку. Разгибаем её. Получаем одну проволочку. Берём пластиковый или металлический шарик и через сквозное отверстие протаскиваем "бывшую скрепку". Теперь приклеиваем эту конструкцию к держателю батареек.
Шаг 6
Наступил самый сложный процесс. Нужно правильно спаять и припаять все проводки. Как это сделать показано на рисунке.

Шаг 7
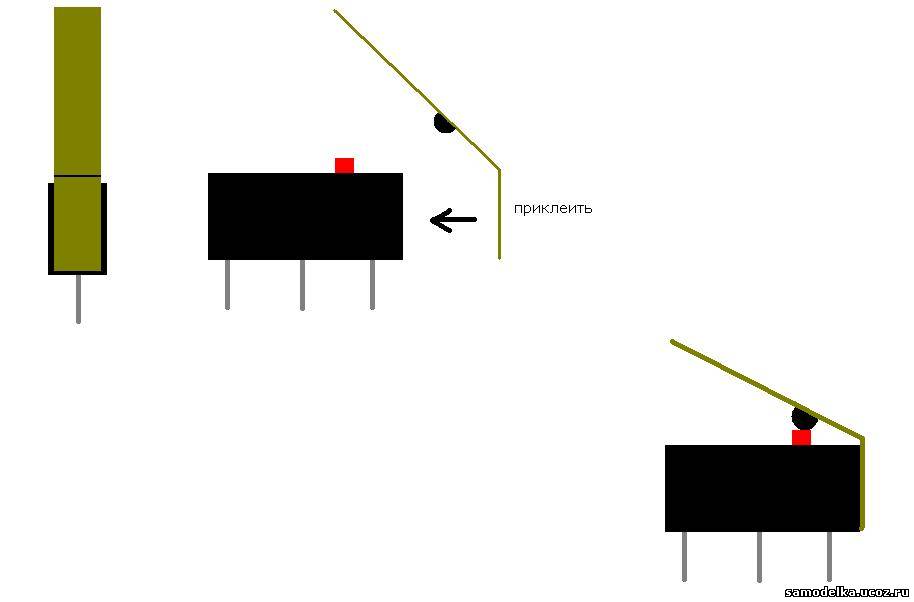
Чтобы наш робот реагировал на окружающий его мир и смог объезжать препятствия мы сделаем ему антенны. Берём две скрепки, разгибаем их.
Далее приклеиваем их к SPDT выключателям (лучше приклеить, чем спаивать - иначе можете насквозь пропаять выключатели).

Шаг 8
Чтобы обезопасить оси моторчиков от поломки, мы оденем их в резину. Для этого можно взять изоляцию от провода и надеть её на ось.


Добавлено (10.03.2010, 22:06)
---------------------------------------------
Ребята не все фотки влезли,то тут чучуть нето  Ну может вы поймёте
Ну может вы поймёте 
Добавлено (10.03.2010, 22:07)
---------------------------------------------
SPDT выключатели можно достать с мышки комп.
































{kind=link}